In our previous blog we demonstrated how the zenoh bridge for DDS allows to (1) bridge DDS communications through zenoh, and (2) reduce by up to 99.97% the discovery traffic between the nodes.
The previous blog was focusing on demonstrating the advantages of using zenoh as the mean for ROS2-to-ROS2 communication over wireless technologies. In this blog, we’ll go one step further and will demonstrate how you can easily write native zenoh applications —meaning that has no dependencies on ROS2 — and seamlessly interact with ROS2 applications. Finally, we will show how you can extend your communication to Internet scale, allowing to cover all the typical cases for Robot-to-anything (R2X) communication.
What does the zenoh/DDS bridge do ?
The zenoh/DDS bridge is leveraging CycloneDDS to discover the DDS readers and writers declared by the ROS2 application. For each discovered DDS entity the bridge creates a mirror DDS-entity — in other terms it creates a reader when discovering a writer and vice-versa. Additionally, the bridge maps the DDS topics read and written by the discovered DDS entities on zenoh resources and performs the proper declarations.
As example, let’s consider the turtlesim package used in the ROS2 Tutorial:
- By default the turtlesim node has a ROS2 Publisher on topic
/rosout. As per ROS2 conventions this maps to a DDS Writer on topicrt/rosout. Consequently, the zenoh/DDS bridge declares a DDS Reader on the same topic with matching QoS. This DDS Reader will receive all publications from the turtlesim on this topic and re-publish those on a zenoh resource having/rt/rosoutas a key. - The turtlesim also has a ROS2 Subscriber on topic
/turtle1/cmd_velthat maps as a DDS Reader onrt/turtle1/cmd_vel. The zenoh/DDS bridge declares a DDS Writer on the same topic, and a zenoh subscriber for the key/rt/turtle1/cmd_vel. This zenoh subscriber will receive all publications with this key from any zenoh application and re-publish those to DDS on topicrt/turtle1/cmd_velto be received by the ROS2 subscriber on/turtle1/cmd_vel.
How to encode/decode ROS2 messages ?
You may have noticed that the zenoh/DDS bridge doesn’t need to be compiled with any ROS2 message definition. That is because the bridge doesn’t need to interpret the ROS2 messages. It just forwards the data payload as is. As a consequence a zenoh application that needs to publish/subscribe to ROS2 will need to encode/decode those messages.
For those who are curious about the details, the ROS2 messages are encoded for DDS following the OMG DDSI-RTPS specification (see §10) in CDR format (see §9.3). But fortunately, you usually don’t need to implement a CDR encoder/decoder, since there are libraries for this in most languages (Python, Rust, C#, Javascript…)
Show me some code
OK, let’s do a zenoh “teleop” app in Python for a start. It will publish Twist messages to the turtlesim’s /turtle1/cmd_vel Subscriber and subscribe to Log messages published by the turtlesim’s /rosout Publisher.
All that you need is:
- A host with ROS2 environment and:
- the turtlesim package
- the zenoh/DDS bridge
- Another host in the same LAN with (or you can use the same host, but that’s less fun…):
- the zenoh Python API and pycdr installed -
just do:pip install eclipse-zenoh pycdr
- the zenoh Python API and pycdr installed -
Note: currently you need to build the zenoh/DDS bridge yourself. But we will provide pre-built binaries for main platforms soon. Once built, the zenoh-bridge-dds executable is generated in the zenoh-plugin-dds/target/release subdirectory.
Now:
Start the turtlesim on host 1:
ros2 run turtlesim turtlesim_nodeStart the zenoh/DDS bridge on host 1:
RUST_LOG=info zenoh-bridge-dds -m peerThe
RUST_LOG=infoenvironment variable is to activate the logs at “info” level. You should see such logs proving that the bridge discovered the turtlesim’s Publishers and Subscribers:[2021-04-13T13:11:58Z INFO zenoh_bridge_dds] New route: DDS 'rt/rosout' => zenoh '/rt/rosout' (rid=19) with type'rcl_interfaces::msg::dds_::Log_' [2021-04-13T13:11:58Z INFO zenoh_bridge_dds] New route: zenoh '/rt/turtle1/cmd_vel' => DDS 'rt/turtle1/cmd_vel' with type'geometry_msgs::msg::dds_::Twist_'On host 2, run the following Python script:
# Some required imports import zenoh from pycdr import cdr from pycdr.types import int8, int32, uint32, float64 # Declare the types of Twist message to be encoded and published via zenoh @cdr class Vector3: x: float64 y: float64 z: float64 @cdr class Twist: linear: Vector3 angular: Vector3 # Declare the types of Log message to be decoded and subscribed to via zenoh @cdr class Time: sec: int32 nanosec: uint32 @cdr class Log: stamp: Time level: int8 name: str msg: str file: str function: str line: uint32 # Initiate the zenoh-net API session = zenoh.open() # Declare the callback and the subscriber for Log messages with key 'rt/rosout' def rosout_callback(sample): log = Log.deserialize(sample.payload) print('[{}.{}] [{}]: {}'.format( log.stamp.sec, log.stamp.nanosec, log.name, log.msg)) sub = session.declare_subscriber('rt/rosout', rosout_callback, reliability=zenoh.Reliability.RELIABLE()) # Publish a Twist message with key 'rt/turtle1/cmd_vel' to make the turtlesim to move forward t = Twist(linear=Vector3(x=2.0, y=0.0, z=0.0), angular=Vector3(x=0.0, y=0.0, z=0.0)).serialize() session.put('rt/turtle1/cmd_vel', t) # Make it move forward until it hits the wall!! session.put('rt/turtle1/cmd_vel', t) session.put('rt/turtle1/cmd_vel', t)
You can see more complete versions of a “teleop” code with various options and arrows key-pressed listener here:
- in Python: https://github.com/eclipse-zenoh/zenoh-demos/tree/main/ROS2/zenoh-python-teleop
- in Rust: https://github.com/eclipse-zenoh/zenoh-demos/tree/main/ROS2/zenoh-rust-teleop
How do I use zenoh to operate my robot from anywhere in the world ?
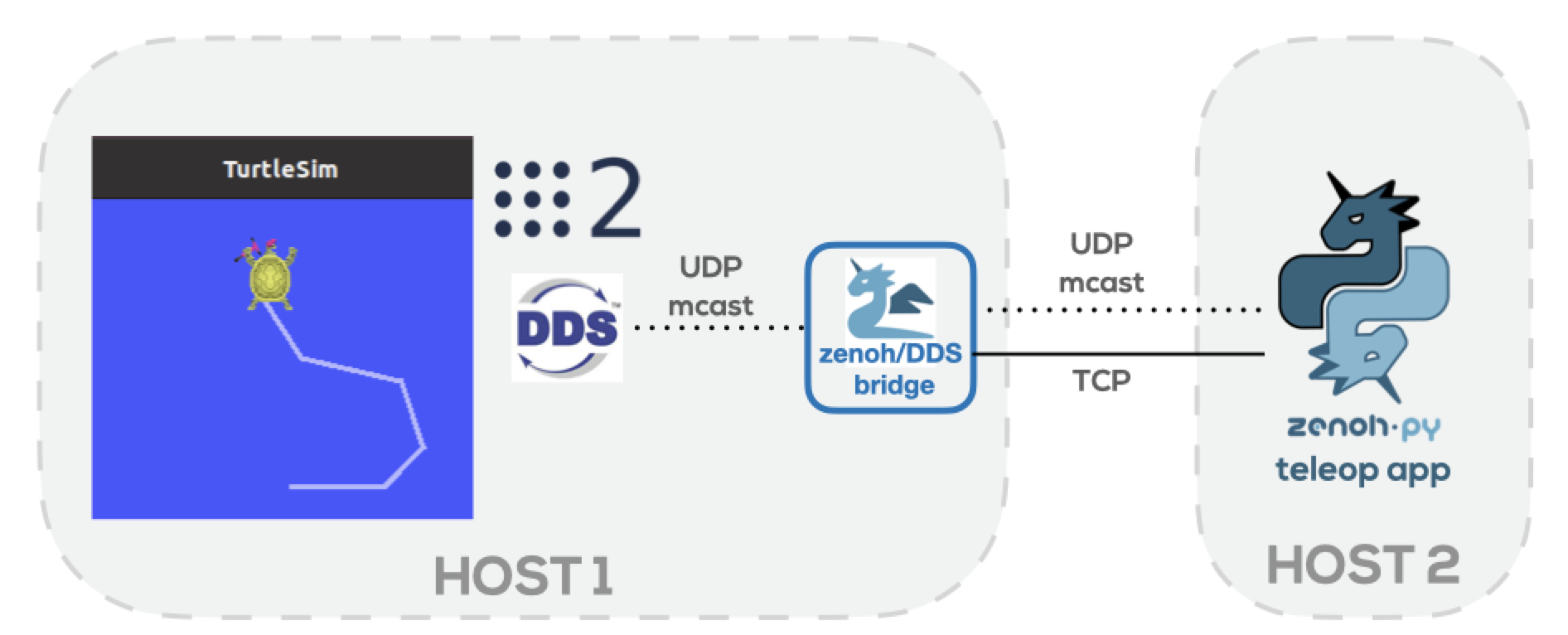
In the scenario described above, the zenoh application discovers the zenoh/DDS bridge via its scouting protocol that leverages UDP multicast - when available. Once discovered, a TCP connection is established between the app and the bridge
But the zenoh application can also be configured to directly establish a TCP connection with a known host, without relying on scouting protocol. Thus, it can connect directly to the bridge (if reachable) or to 1 or more zenoh routers that will route the zenoh communications between the application and the bridge.
Let’s see the different use cases:
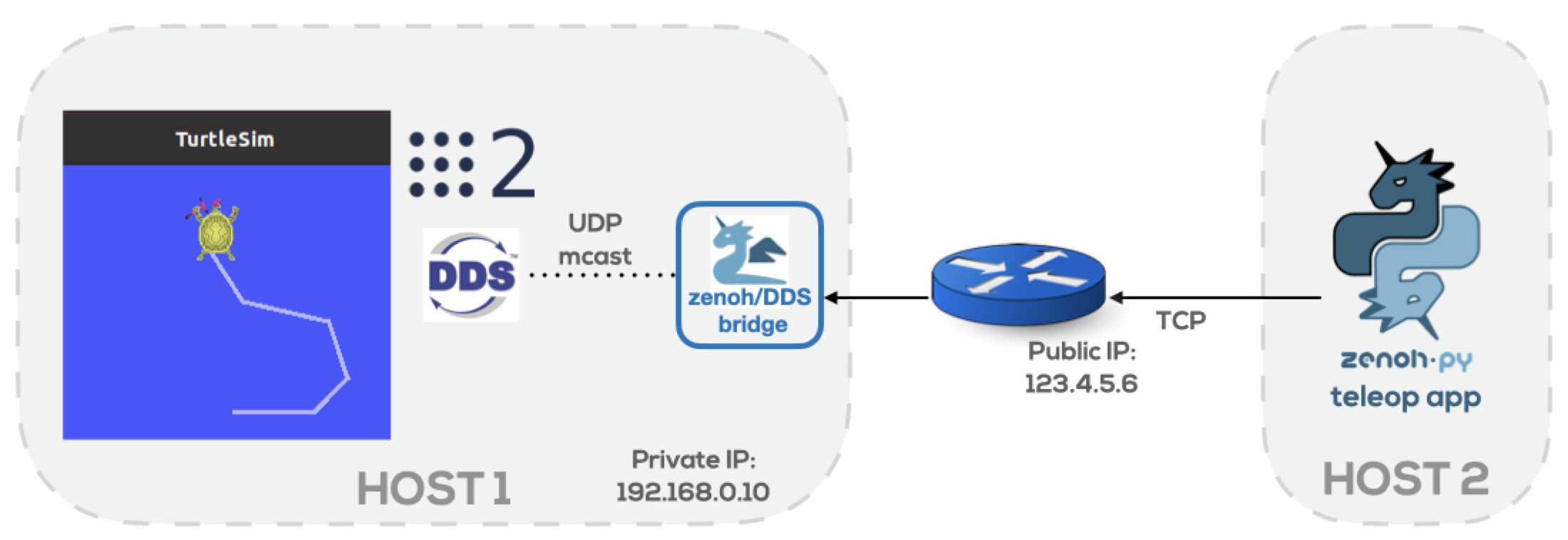
1. Opening a TCP port and redirecting it to the zenoh/DDS bridge
Assuming you can configure your internet connection to open a public TCP port (e.g. 7447) and redirect it to the host running the zenoh/DDS bridge, you can do the following deployment:
Where:
the zenoh/DDS bridge is started with this command:
zenoh-bridge-dds -m peer -l tcp/0.0.0.0:7447The
-loption makes the bridge to listen for TCP connection on port 7447.Our zenoh teleop application must be configured to connect to the public IP and port of the bridge.
In Python, this is done adding a"peer"configuration when initializing the API:# note: replace "123.4.5.6" with your public IP in here: session = zenoh.net.open({"peer": "tcp/123.4.5.6:7447"})With the “teleop” demos provided here, you can use the
-e tcp/123.4.5.6:7447program argument.
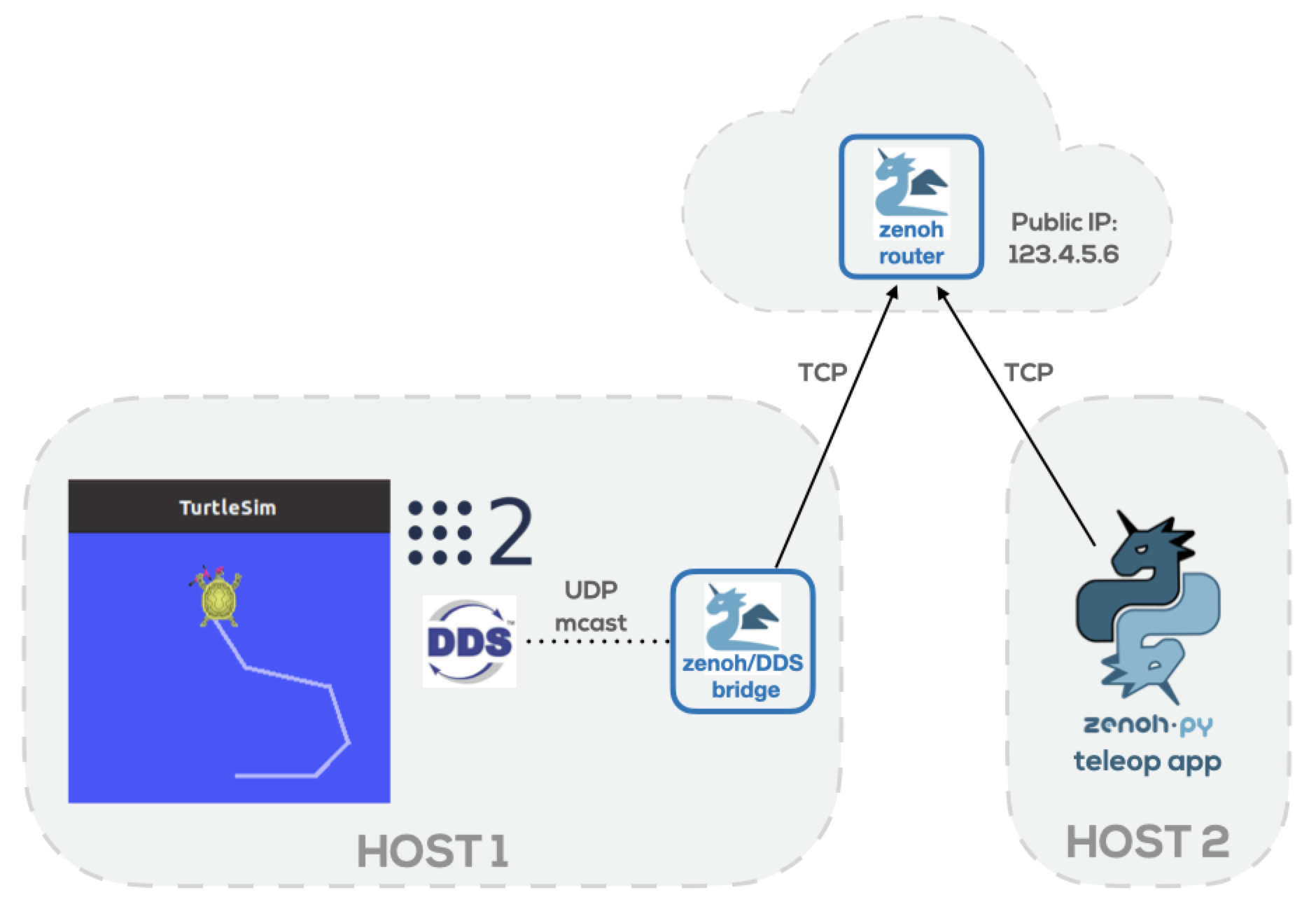
2. Behind a NAT? Leverage a zenoh router in the cloud!
If you can’t open a public TCP port in your LAN, let’s use a zenoh router in a public cloud instance that will intermediate the communications between the bridge and the zenoh application:
To deploy this:
Pick your favorite cloud provider and provision a 64-bit Ubuntu VM with a public IP.
Install the zenoh router in this VM following those instructions: http://zenoh.io/docs/getting-started/installation/#ubuntu-or-any-debian-x86-64
Run the zenoh router in your vm staring:
zenohdNow the zenoh router is reachable on via the public IP of your VM on port 7447 by default.
Run the zenoh/DDS bridge as a router client, making it to connect the zenoh router:
# note: replace "123.4.5.6" with your cloud VM's public IP in here: zenoh-bridge-dds -m client -e tcp/123.4.5.6:7447our zenoh teleop application must be also configured as a router client to connect the zenoh router:
# note: replace "123.4.5.6" with your cloud VM's public IP in here: session = zenoh.net.open({"mode": "client" , "peer": "tcp/123.4.5.6:7447"})With the “teleop” demos provided here, you can use the
-m client -e tcp/123.4.5.6:7447program arguments.
3. What if my cloud instance crashes or reboot ?
Just deploy several interconnected zenoh routers in different cloud instances:
- Run a first zenoh router in 1st cloud:
zenohd - Run another zenoh router in 2nd cloud, connected to zenoh router in 1st cloud:
zenohd -e tcp/123.4.5.6:7447 - Run the zenoh/DDS bridge as a router client, configured with the 2 zenoh routers’ locators:
# note: replace "123.4.5.6" and "123.7.8.9" with your cloud VMs' public IPs in here: zenoh-bridge-dds -m client -e tcp/123.4.5.6:7447 -e tcp/123.7.8.9:7447 - our zenoh teleop application must be also configured as a router client and with the 2 zenoh routers’ locators:With the “teleop” demos provided here, you can use the
# note: replace "123.4.5.6" and "123.7.8.9" with your cloud VMs' public IPs in here: session = zenoh.net.open({"mode": "client" , "peer": "tcp/123.4.5.6:7447,tcp/123.7.8.9:7447"})-m client -e tcp/123.4.5.6:7447 -e tcp/123.7.8.9:7447program arguments.
Now, both bridge and zenoh application will connect to the 1st configured locator (i.e. router in 1st cloud). If this one fails, they will both failover to the router in 2nd cloud.
4. Other deployments (e.g. mesh network)
Notice that in the previous use case, as the 2 zenoh routers are interconnected, the zenoh/DDS bridge and the zenoh application don’t need to be connected to the same router to communicate with each other. If they are connected to distinct routers, they will route the zenoh traffic between them, and the bridge and the application will still communicate with each other.
Actually, you can deploy the zenoh/DDS bridge, your teleop application and one or more interconnected zenoh router in all the ways described in the zenoh documentation. Just use the -m peer or -m client argument for the zenoh-bridge-dds to configure it as a peer or a client. And similarly for your zenoh teleop application.
One more thing…
Did I mention that you can easily communicate with more than 1 robot using Eclipse zenoh? Let’s make several independent turtlesims move in a synchronous way!
Start as many turtlesim you want, each using its own ROS domain1:
ROS_DOMAIN_ID=1 ros2 run turtlesim turtlesim_node
ROS_DOMAIN_ID=2 ros2 run turtlesim turtlesim_node
ROS_DOMAIN_ID=3 ros2 run turtlesim turtlesim_node
...
For each turtlesim, run a zenoh/DDS bridge using the same ROS domain (via -d argument) and specifying a prefix that will be added to each zenoh key (via -s argument):
zenoh-bridge-dds -d 1 -m peer -s /bot-1
zenoh-bridge-dds -d 2 -m peer -s /bot-2
zenoh-bridge-dds -d 3 -m peer -s /bot-3
...
Now for turtlesim on domain 1, the /rosout and /turtle1/cmd_vel ROS2 topics are mapped respectively to /bot-1/rt/rosout and /bot-1/rt/turtle1/cmd_vel zenoh keys. And similarly but with a different prefix for each turtlesim.
The zenoh trick to rule them all is to just subscribe and publish via path expressions. In the Python code shown above:
- subscribe to
'/**/rosout'instead of'/rt/rosout' - publish Twist messages to
'/**/cmd_vel'instead of'/rt/turtle1/cmd_vel'
You can also test this with the “teleop” demos provided here, using the --rosout='/**/rosout' --cmd_vel='/**/cmd_vel' program arguments.
Why 1 domain per robot ?
In most of the cases, you don’t need the robots to communicate with each other. But if you let them use the sameROS_DOMAIN_ID, their DDS entities in the robots will anyway exchange discovery information with each other leading to a lot of unnecessary traffic that could be problematic over wireless communications (as seen in our previous blog). The simplest way to avoid such traffic is to use distinct domains. Other solutions could be specific network configuration, or specific DDS configuration. ↩︎