The new Zenoh Charmander 0.7.2-rc is out and comes with some aces up the sleeve! This patch release marks as stable the following APIs:
- C++ API
- Query payload
It introduces some new features:
- C++ API is now compatible with both zenoh-c and zenoh-pico
- TLS supports now Let’s Encrypt and IP-based certificates
- Key formatters
- Transport protocol whitelisting
It brings to life these experimental features:
- Zenoh and ROS1 bridge
- Liveliness assertion
- Transparent compression
And it also comes with a load of various bug fixes and improvements.
C++ API
Zenoh Charmander 0.7.0-rc introduced experimental support for C++ bindings, which are built on top of the Zenoh C API. This release introduces the support of zenoh-pico in addition to the already supported zenoh-c. This means you can now write your Zenoh C++ application and run it on any embedded platform supported by zenoh-pico! You can check here how to set up zenoh-cpp as a library and switch between zenoh-c and zenoh-pico.
Moreover, this release finally provides the full coverage of the Zenoh stable API, including shared memory support (see C and C++ examples). The build for zenoh C/C++ projects was also made simpler and more flexible. Now zenoh-c, zenoh-pico and zenoh-cpp can be directly included into the parent CMake project without installation - see examples here. The full set of C++ examples is available here.
Stay tuned for an upcoming, detailed blog post on the C++ API that will be published shortly.
Query payload
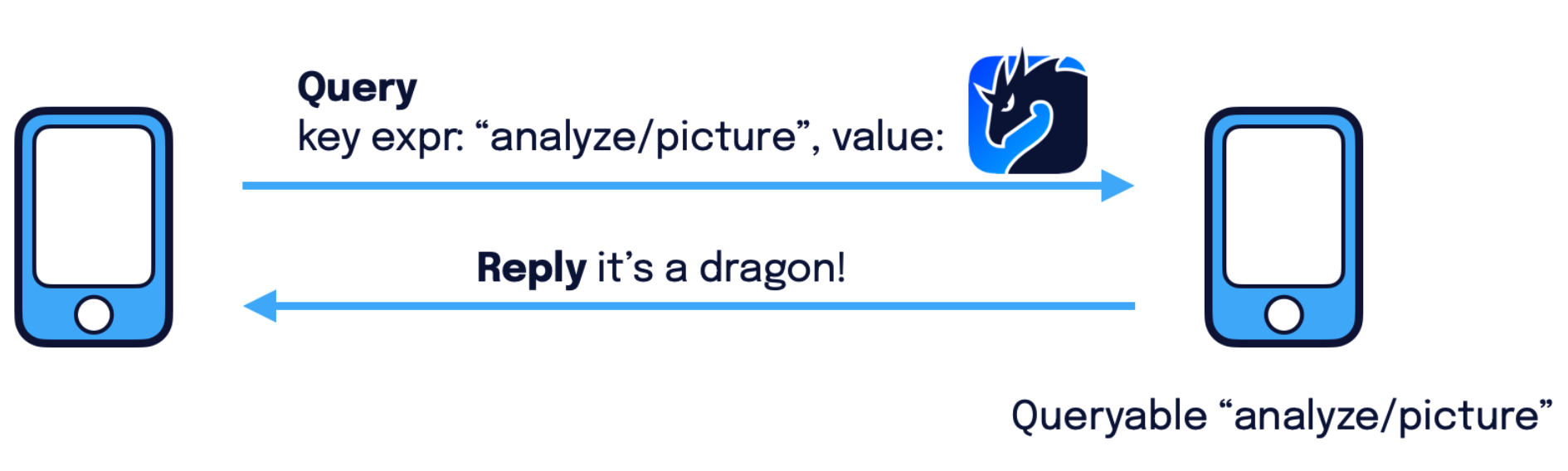
The query payload API has been marked stable and added to all Zenoh examples: in Rust (get and queryable), C (get and queryable), C++ (get and queryable), Python (get and queryable), and Zenoh-Pico (get and queryable). As a reminder, a query has now gained the possibility to carry some user payload that can be received and interpreted by the matching queryables. For example, you can now attach a picture to a query that is analyzed by a queryable running an object detection algorithm as shown in the figure below.
TLS updates
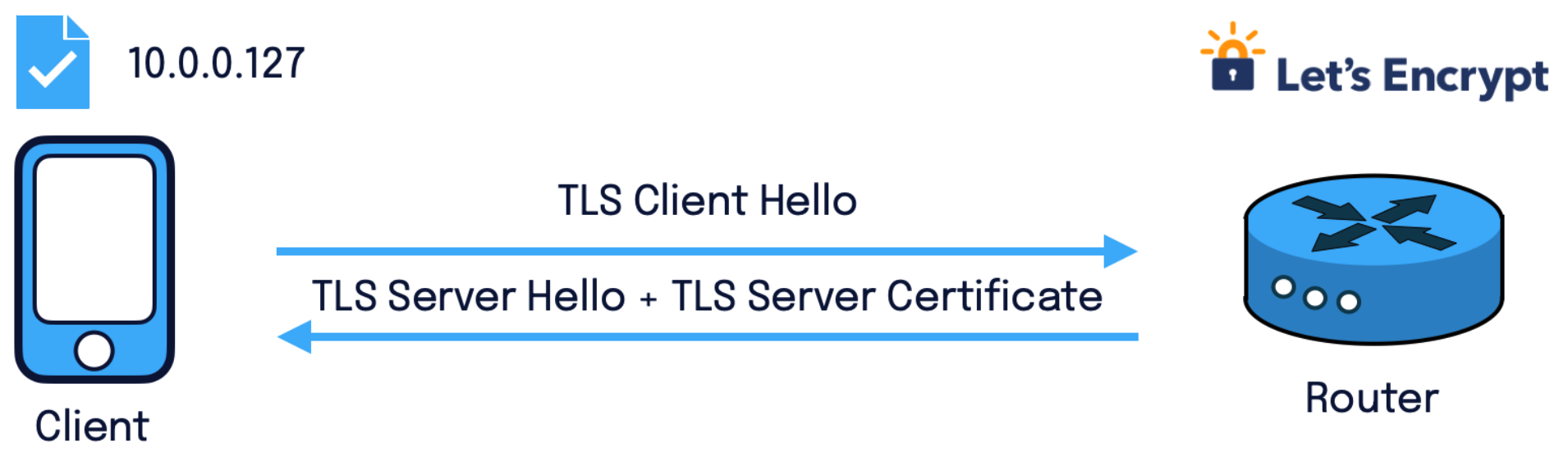
This release adds the support for Let’s Encrypt TLS certificates in Zenoh. More information on how to use it, for example to set up a Zenoh router in the cloud with TLS support can be found in this dedicated blog post.
Moreover, the TLS library used by Zenoh (Rustls) has finally added the support for TLS certificates based on IP addresses instead of DNS names. To test it out, it is enough to generate the TLS certificates according to these instructions.
S3 Backend updates
This release also includes some updates for the S3 backend. The first version of the plugin already provided many functionalities, such as the communication between Zenoh and AWS S3 servers, compatibility with MinIO S3 instances, and TLS communication. However we were missing timestamp handling on our side, which could lead to some edge case concurrency issues. In this release we handle this problem.
Key Expression Trees and Formatters
With Zenoh 0.6, we introduced a new definition for Key Expressions (KE) to make them both faster and more predictable. Now introducing KeTrees and KeFormatters (Rust exclusive for now). A full blog post on both of these is coming soon, but in the meantime, here’s a quick sum-up.
KeTrees: it may be tempting to just put KE-value pairs into a hashmap and be done with it, but the reality is that you’re likely to lose the intersection/inclusion semantics of KEs when doing that. KeTrees are built to let you iterate on intersections between KEs as fast as possible.
let mut tree = KeBoxTree::new();
tree.insert(keyexpr::new("a/b").unwrap(), 1);
tree.insert(keyexpr::new("a/c").unwrap(), 2);
tree.insert(keyexpr::new("b/c").unwrap(), 3);
let intersection = tree.intersection(keyexpr::new("a/**").unwrap());
// intersection is an iterator which will yield the nodes for "a",
// "a/b" and "a/c", which will have weights `None`, `Some(1)` and `Some(2)`
// respectively. The order isn't guaranteed.
KeFormatters: because KEs are Zenoh’s address-space, they’re a fairly important thing for your team to manage correctly. You’re likely to end up defining your address space in a manner similar to REST APIs. KeFormatters are here to help you manage this in 3 steps:
- Define a format:
zenoh::kedefine!(pub temperatures: "factory/temperature/sensor/-/${factory:*}/${sensor:*}"); - Use it to construct KEs, letting the formatter ensure that you aren’t accidentally breaking your API (setting
factory = “5/42”in the following example, for example, would cause an error.
let mut formatter = temperatures::formatter();
let ke = zenoh::keformat!(formatter, factory = 5, sensor = 42).unwrap();
- Or use it to parse incoming KEs to extract the information you actually care about:
let parsed = temperatures::parse(ke).unwrap();
assert_eq!(parsed.factory(), Ok("5"));
assert_eq!(parsed.sensor(), Ok("42"));
Transport protocol whitelisting
A new configuration option has been added in zenoh to allow only certain network protocols to be used by Zenoh. In order to understand what that means, we need to take a step back and see how Zenoh operates. Zenoh can work on various network protocols as shown in the figure below.
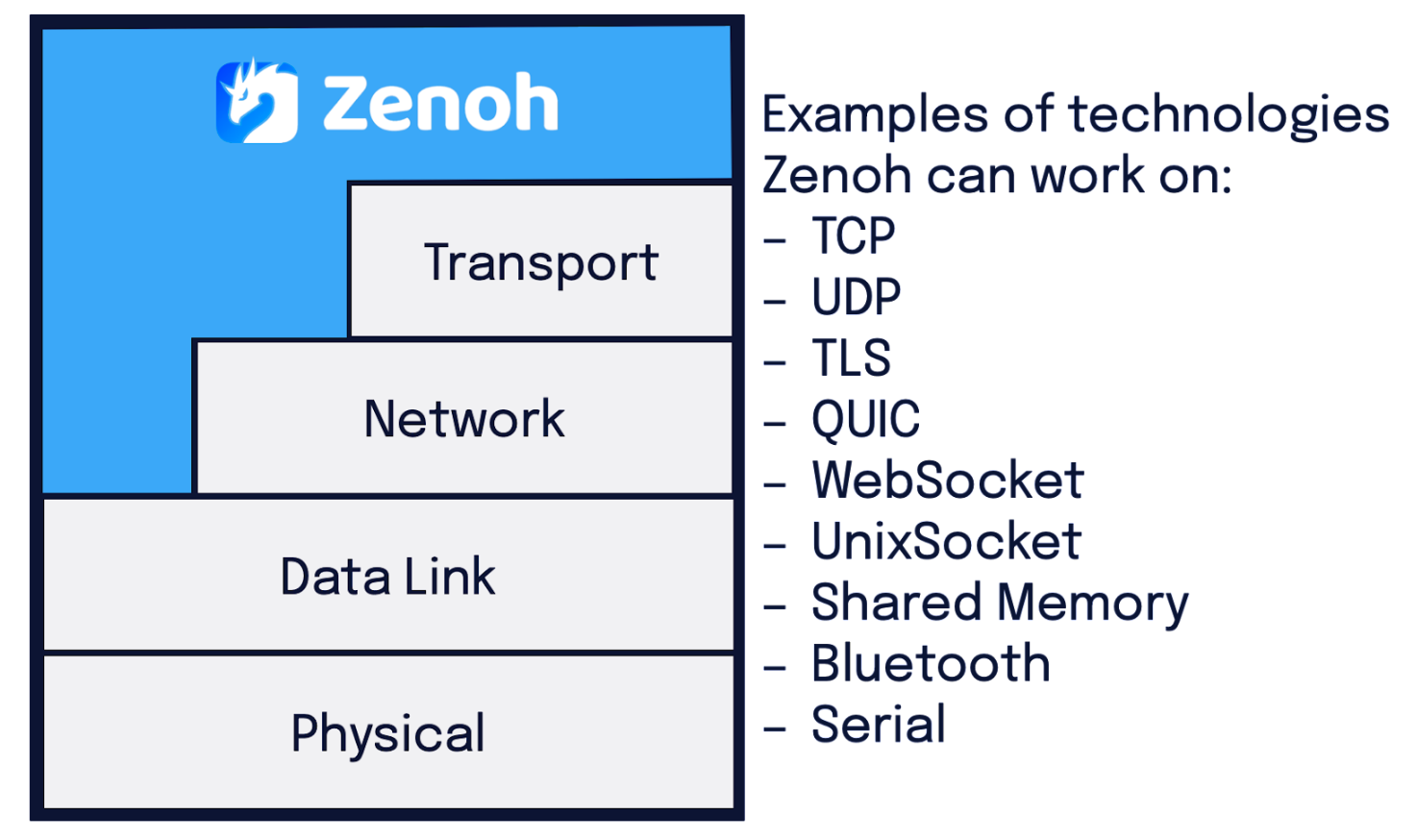
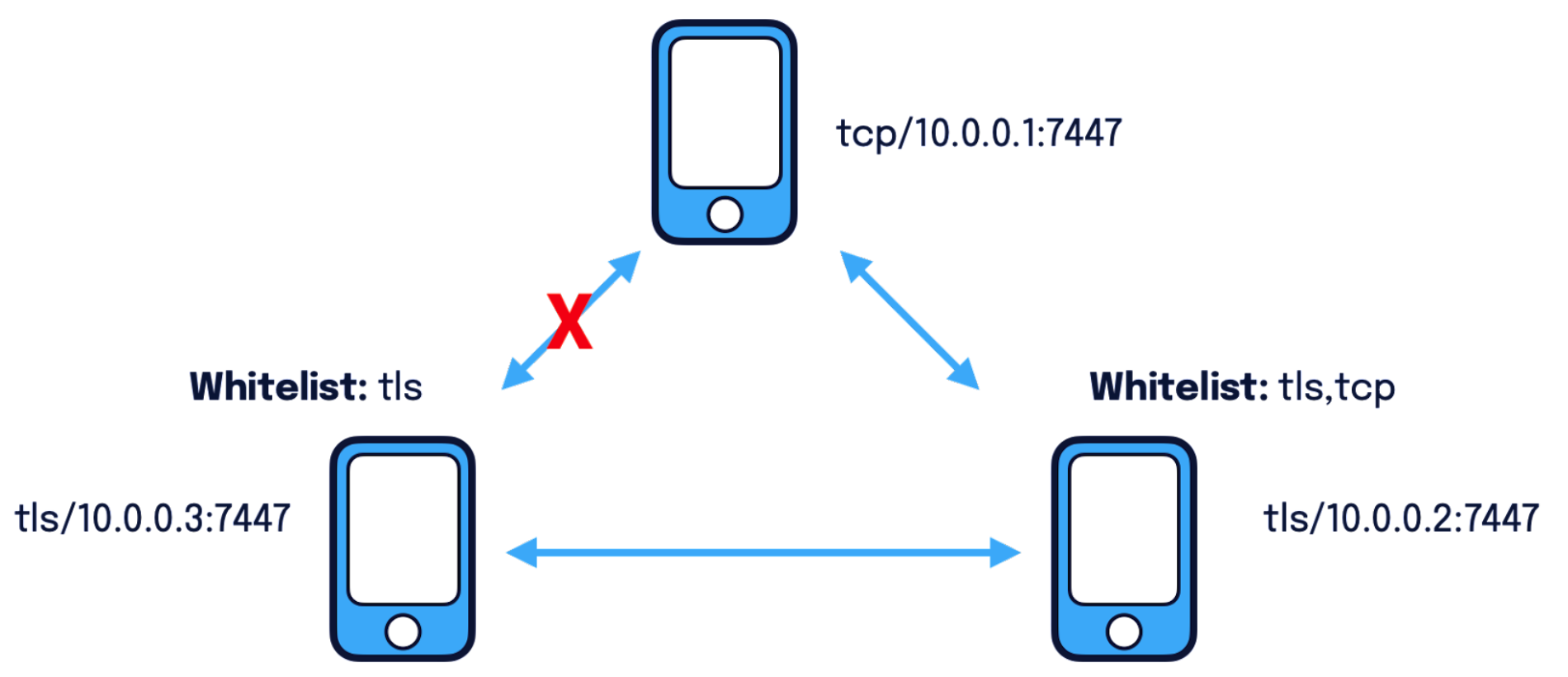
Depending on the use case and requirements, certain protocols may be preferred to others. E.g., we would like to force all the Zenoh communication to happen on TLS, which provides encryption, and not on TCP, which is less secure. In normal operation, Zenoh will try to connect via any available means to the other Zenoh nodes (e.g. peer or router). I.e., if a node supports multiple protocols (e.g. TCP, UDP, TLS), it will try any of those until it succeeds. However, in some cases it would be nice to limit the protocols to be used.
Until this release, the only way to disable certain protocols was to build Zenoh and disable them at compile time. This is clearly a tedious and long process that force the user to multiple builds just to support different combinations of required protocols. What about this release then? The newly introduced transport protocol whitelisting is now possible to configure at deployment time which protocols to enable via the Zenoh configuration. No more rebuilds needed! The figure below shows an example of a Zenoh peer who has configured only TLS as protocol whitelist and it will fail to connect to a Zenoh peer only offering TCP connectivity.
Here below is an example of the configuration for the transport whitelisting.
transport: {
link: {
/// An optional whitelist of protocols to be used for accepting and opening sessions.
/// If not configured, all the supported protocols are automatically whitelisted.
/// The supported protocols are: ["tcp" , "udp", "tls", "quic", "ws", "unixsock-stream"]
/// For example, to only enable "tls" and "quic":
protocols: ["tls", "quic"],
}
}
ROS1 bridge
ROS1 is a very popular meta-operating system for robotics. It consists of the main core (peer-to-peer message exchange primitives, environment, broker - “rosmaster”, interface definition tools, package system) and numerous packages and tools providing extra capabilities built on top of the core: HAL, device drivers, components and algorithms collection etc.
A typical ROS1 system is a set of services communicating through some closed network and performing on different levels: from low-level hardware control (servo motors, sensors) and up to some high-level functionality (autopiloting, telemetry collection, parameter tuning, remote control etc).
Despite the fact that ROS1 operates on a peer-to-peer network, it is not designed to be ultimately scalable and leaves a lot of scalability problems to be solved by the user. In this condition, we believe that bridging ROS1 systems to Zenoh could do the trick, allowing ROS1 users to utilize all power of Zenoh in their solutions.
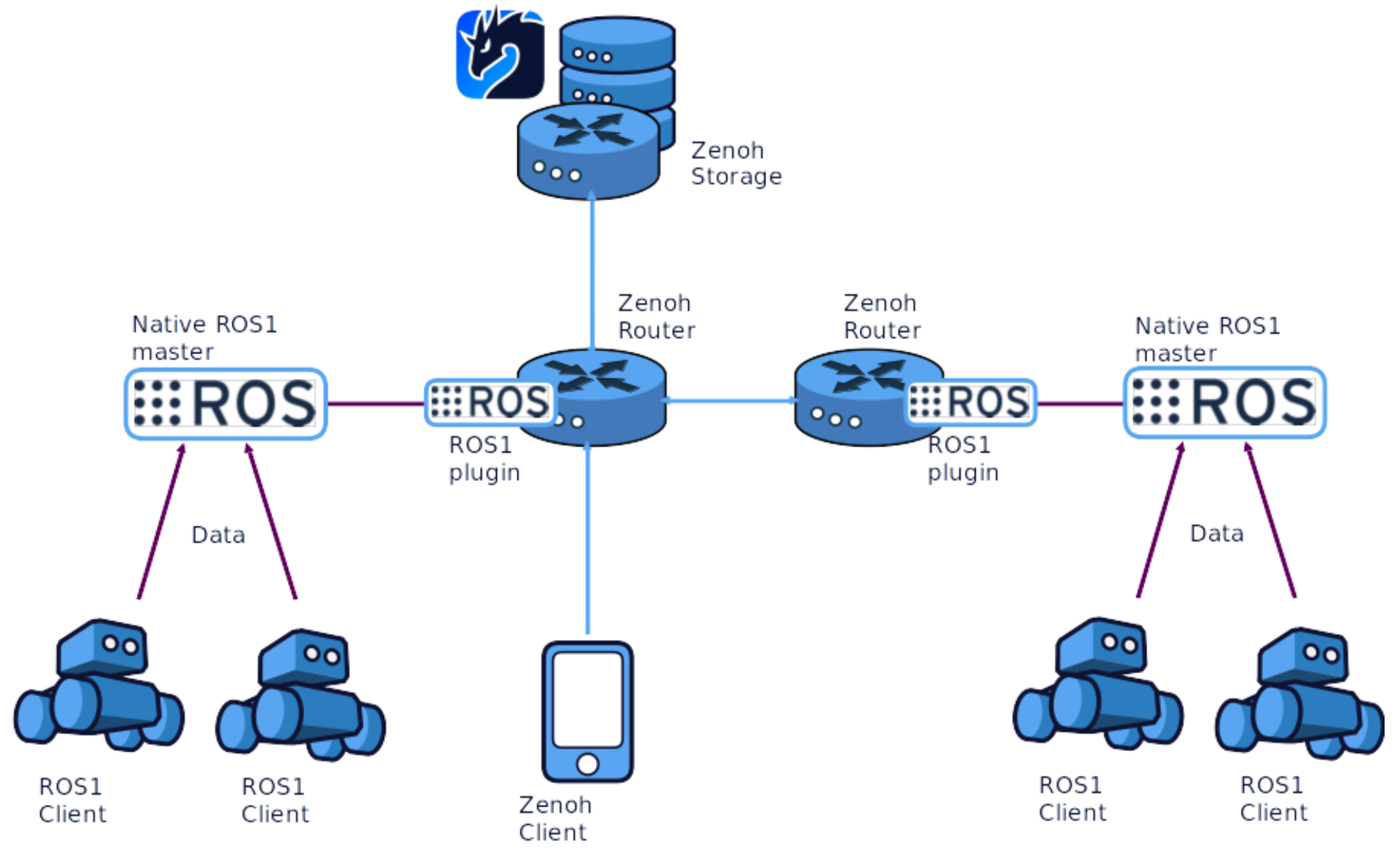
An alpha version of ROS1 to Zenoh bridge is introduced in this release. This bridge is quite similar to the ROS2 bridge, but it offers some limited functionality for ROS1 systems. An example integration is shown on the following schema:
Capabilities:
- Bridging publishers, subscribers, services, clients
- ROS1-to-ROS1 interaction support
- ROS1-to-Zenoh interaction support
ROS1 bridge has some limitations which, however, are planned to be completely eliminated in the nearest future:
- All topic names are bridged as-is
- All topic data types and md5 sums are bridged as “*” wildcard and may not work with some ROS1 client implementations
- Performance may be significantly improved, mainly by improving the Rust ROS1 bindings.
- Supports only TCPROS protocol
Liveliness support
This release introduces the liveliness feature. It allows any Zenoh application to assert and monitor the liveliness of any other Zenoh application in the network. Zenoh applications can declare liveliness tokens associated with some key expressions. Liveliness tokens will be seen as alive by other Zenoh applications while the Zenoh application that declared it is alive.
Zenoh applications can query alive tokens with the get_liveliness function and subscribe to liveliness changes (apparition/disappearance of liveliness tokens) with the declare_liveliness_subscriber function.
This feature is only available in the Rust API and is marked unstable: it works as intended but the API may change in the future. More details can be found here. Examples can be found here, here and here.
Compression (experimental)
An experimental transparent compression feature is added within this release, so far with promising results. The compression is performed hop to hop in the network, meaning that messages are compressed by the sending node and decompressed by the receiving node (a node being either a router, a client or a peer).
In order to enable the compression feature, Zenoh needs to be built enabling the “transparent_compression” and the “unstable” feature. Beware that for the moment, every node on the network needs to be built with those features if we want to have compressed communication even on a single link of the network. In the future we plan to add automatic negotiation for compression to support different configurations.
In the configuration file we can enable or disable the compression as shown below:
{
transport: {
link: {
compression: {
enabled: true,
},
},
},
}
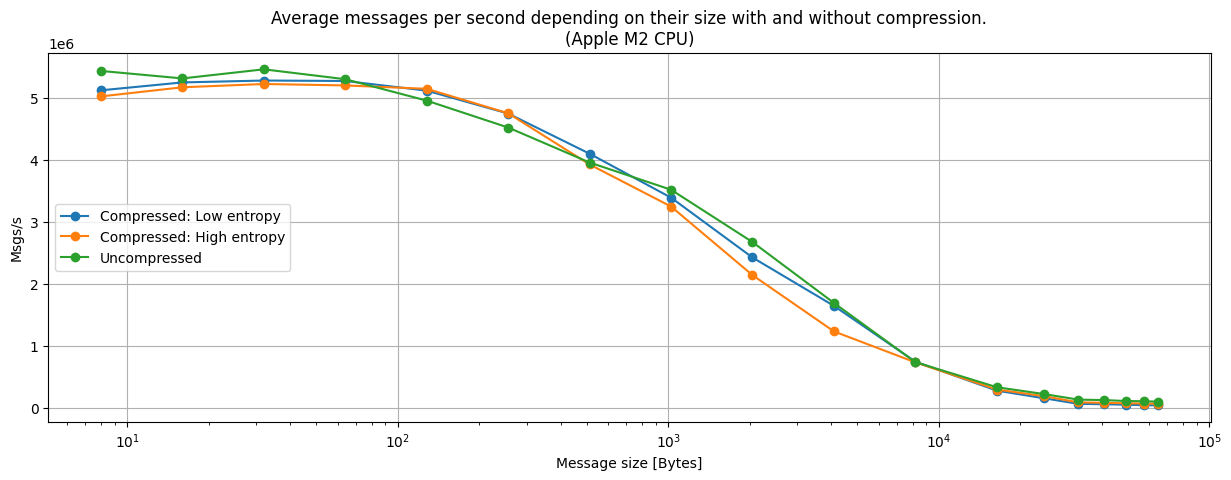
So far the metrics collected on a local environment show promising results. By running the z_pub_thr & z_sub_thr tests (which allow us to measure the amount of messages sent per second through Zenoh) on a local environment composed of a Mac with an M2 processor, we see that even for a worst case scenario with batches containing high entropy payloads (resulting in a low compression rate), the amount of messages per second sent through the Zenoh network behaves as well as in the case compression is disabled.
However, it’s in terms of size that we notice the biggest difference. In the worst case scenario we end up sending batches with the same size as the original batch, while for a best case scenario (for low entropy batches with high compression rate) then the gain in size is huge! A 64KB batch is reduced to a couple hundred bytes.
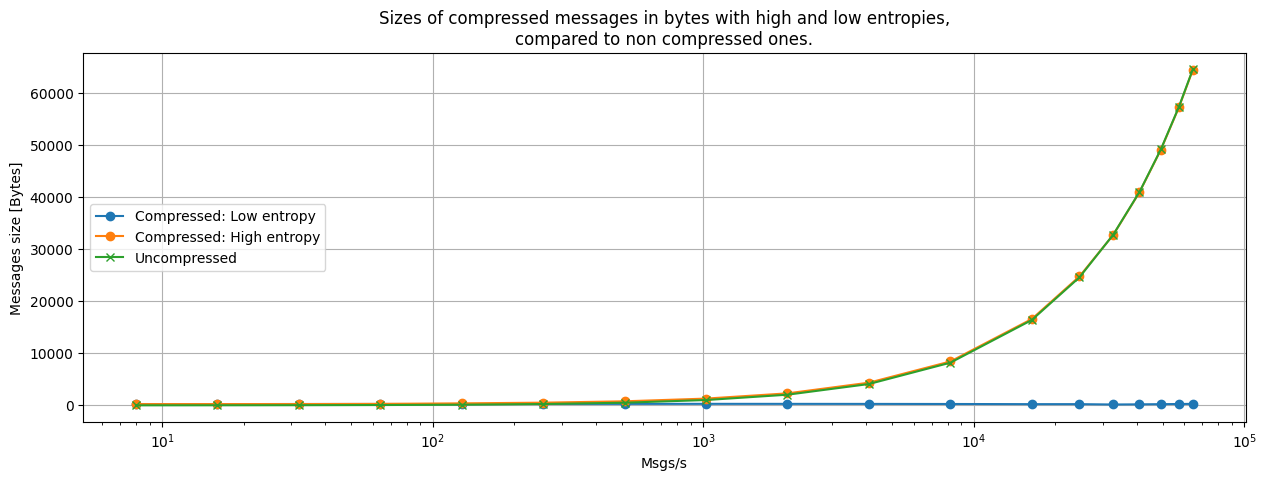
Of course, in terms of entropy for the batches, in real life most of the time we will deal with something in between the best and worst case scenario. We can expect that the gain in size will not be as optimal as in the best case scenario but the transparent compression feature will cause a considerable gain anyway, reducing the bandwidth needed to send messages through the network.
What’s next?
Are you ready to keep rocking with Zenoh?

These are the cool features you can expect for the months to come:
- An improved shared memory support
- Kotlin Android API
- A multicast transport
And many other cool things…
And don’t forget to stay in touch with the Zenoh team on Discord and to propose new features on the roadmap.